Unit 2 : Leopard Walk
- Briony Davies
- Feb 3, 2025
- 8 min read
Updated: May 7, 2025









Key poses in my own walk cycle
In the second unit, we delve into animal locomotion, allowing my skillset to expand to the fundamentals of quadruped walks. This begins exploring the more realistic animal animations and cycles. The aim is to animate a walking leopard, but first understanding the different types of four-legged animals and their walks. From research, Leopards have a flexible and agile walk, allowing them to be stealthy, fast and quiet. They hunt by pouncing on their prey and can climb trees, so they have super flexible spines and powerful legs as "their front limbs are free from attachment to the collarbone (joined only by ligament and muscle) which allows free movement" Arnott (2018), which is different from other four-legged animals such as horses, cows and even tigers. I think it's important to understand this to capture a realistic performance for the animal. We were given a reference of the key poses of this animal in the tutorials to create a consistent animation and to understand timing and motion. I also used a reference from Timing for Animation (Whitaker and Halas, 2009, pp. 106-107) book that included quadrupeds, which briefly explained the anatomical differences in movement between an animal such as a tiger and a deer. We also delved into the work of Glen Keane, an American animator, who has a deep understanding and wide knowledge on animating animals. Keane demonstrates the core principles of squash and stretch, overlapping and the movement of joints done correctly. This helped understand the combination of these techniques in order for me to create a quadruped walk and the importance of the spine in the body. Other elements I had to consider were the areas of the body such as the chest, hips and head, which all form the main solid masses, as well as the skeletal structure. To understand the movement of the joints and the solid masses of the animal allows for the realistic flow of animation. Of course, this is a leopard walk cycle so the gaits and naunces are different to that of a tiger (even if both are a part of the cat family) or deer or any other quadruped animal, so research on anatomy is vital to effectivley imitate a leopard, even with the tutorial given.
I also examined the work of the Motion Picture Company, known for its innovative techniques and productions that are creature-heavy in animation, such as "The Lion King" (2019). I analysed this film, as well as the behind-the-scenes footage from "THE LION KING (2019) | Production Material Featurette" to understand the application and development of such animations within the industry. This production represents a significant advancement from the original 2D animated film, transforming the fantasy world into a more realistic experience. As this realistic and lifelike style gains popularity in adaptations, it is beneficial to gain and refine skills that create realistic animal dynamics. One innovative piece of technology that stood out to me during this featurette was the use of virtual reality. In order to create an entirely digital film without lacking the "human" quality (Favreau, 2021, 17:58 - 18:21), they created the scenes and shots in VR where they then entered that virtual world to plan and execute camera shots and character positions in a "physical" way (FilmIsNow Epic Movie Zone, 2021). It was also insightful to see how they captured the realistic gaits and subtleties of real-life animals and the level of detail the production teams created just for the audience's benefit. A word to describe this film style and to an extent, the process is that of a "documentary" for its dedication to realism, which therefore pushes the importance of technology mixed with animal movement and behaviour in animation.
To begin the process of my animation, I set up my project and scene and planned out what I am going to animate. I decided to start by putting in the key poses (pose to pose) of the feet first. This is evidently the main part of the cycle and as there are four legs, it was significant to get the positions and timings exact. Additionally, before I put in the keyframes and I set the tangents to stepped, to help me block out the poses for consistency. It ranges from frames 1-33 so it will loop back. This is convienant and appropraite for this animation as it is a walk cycle and will demonstrate my understanding for animating animals, animating characteristics of specific animals and animating a walk cycle realistically. I followed the guided references for this exercise, but also created my own thumbnails (see at end of blog) so I could understand each pose and prepare better. I also did an anatomical sketch of a leopard to have insight of the joints and bones in the body, to really see how they will move. Moreover, I watched a video to analyse the sleek movement of the animal - Leopard walks in the forest to survey his territory (2019) on YouTube. This helped me gain a better understanding of joint movement, allowing me to add more detail and realism.
The body can also be sectioned into three main solid masses : the head, chest and hips. By using this, I was able to clearly see where the head moves up and where the hips move down in correlation to each other. Once I blocked out the key poses on the main controls of the body (shoulders, waist, hips, head and paws), I worked with spline curves to then asses the flow of movement between each frame and correct any issues, such as the paws sliding and rotating too much. Luckily at this stage, I did not come across any technical issues, but in the tutorial it was suggested that if there is an unnatural rotation (looks like an error on the control) you could use the Euler filter, something I have never used before, and I did not need it in this case, but this is a tool I'll remember and refer to if needed. Once I felt the main frames had solid and clear fluidity, I moved on to other controls for detail and further clarity of motion. I prefer to work in stages, so the first stage being the main poses, then the second is adding in other controls. I focused on the muscles in the legs, showing them moving back and forth in time with the paws. As they are the muscle carrying the legs, and muscle flexes when the paw hits the ground as it's using more weight on that leg and balancing the body, thus building up strength and power for the next move. This help create the realism of the character. On the main controls of the shoulders, waist and hips, as well as the up and down motion, I refined this by adding in rotations. This is to show the natural movement of these joints as the spine twists side to side during the walk. . As the right front leg moves forward, the shoulder rotates with it, and as the right front leg holds the weight as the left front leg lifts off the ground, the right shoulder rotates up. Each shoulder works in opposition, creating this circular movement, and vice versa with the hips. This improved the mobility and flexibility of the animal to create lifelike motion. In this video here, you should be able to see how the controls are moving.
I then went through the more specific controls on the body to adjust the paws specifically, as the joints weren't bending as naturally as they should. The paws should roll after contact with the ground, so I added in some extra keyframes to include this action. Additionally, the paws should spread out as the full weight of the body passes through them on contact, so I incorporated that in the frames. Moreover, as the animal was animated on the spot, the legs needed to move at a constant rate, so I adjusted the frames in the graph editor by straightening out the tangents between the contact poses.
Furthermore, once I felt confident in the overall performance of the foundation of the walk, I moved on to the tail. From my previous knowledge and experience, I used the principles of overlapping and follow-through on the tail. Wherever the back of the body moved, there was a delay or secondary action in the tail following the direction. I also offset the frames on the tail to show some fluidity in movement and to prevent stiffness. I then included some subtle movements to the face, such as the mouth and ears, to create some liveliness in the animation. I planned to create a straightforward walk cycle, but I did add some additional animation to incorporate some creativity and individualism. I kept it simple and soft by having the leopard come to a stop, as if it heard a noise. I found this change of movement hard to navigate, actually, as I had to change the timings and poses. I looked at my references to have an idea of how they slow down and stop and began adjusting the frames on the time slider. The difficulties I had were having the head come to a stop as it was jittery. I believe this was because the head was being moved by multiple controls (the head control and neck controls). Additionally, the body was being moved across the scene by the main control, which I found is great to convey a simple walk cycle on a plain background, but when adding in a set, there were some timing issues. This was more time-consuming than I initially considered as it was hard to find a constant speed that matched with the paws as well, meaning the feet were sliding. As I included the slowing down and stopping at the end of the cycle, this also affected the speed of the main control.
A challenging aspect of this process was making sure each main pose was correct and performed clearly, in order to display this type of walk. For example, in the first pose, the front right paw is bent and passing through, but the rig didn't fully allow for this position as it would stretch the mesh and look unnatural. Therefore I had to adjust the paw to be a bit more relaxed, but still capturing the essence of the movement.
The Final Animation
This is the final animation. I feel confident in animating the core requirements for a quadruped walk cycle. I now have a comprehensive understanding of the elements that contribute to a quadruped walk and the critical role each body part plays in conveying a sense of realism. This is helpful to use as a foundation to build more exciting and various types of quadruped walks and/or sequences that involve walking. I could develop this skill set further by adding more personality within the walk and create a sense of individualism in my own style. For this specific animation, I can see areas of improvement. For example, the back paws move too fast on contact, making it appear to slip. I also think I could improve the flow of the head and off-set it slightly, just to show the impact of the front legs hitting the ground.
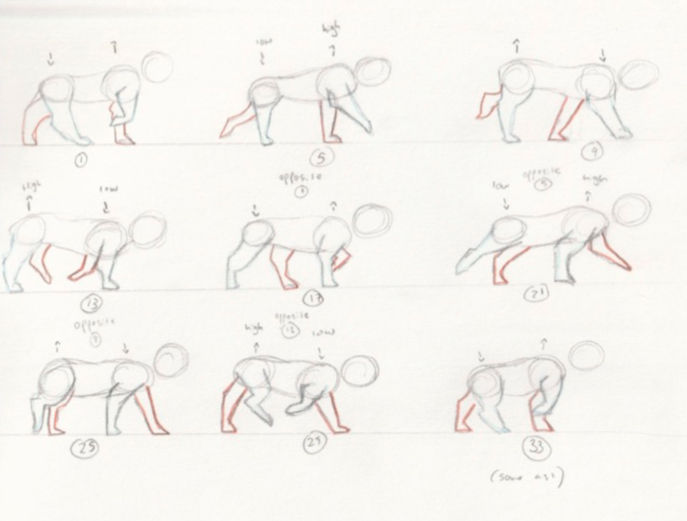

My own drawings to reference
Refinements and Reflections
As I reflect upon this second unit and attained feedback, I wanted to improve the constant flow of speed of the feet as I felt they were moving to fast. I adjuted this until it looked natural and realistic. I also added in a set, as I felt it would bring everything together and create a more exciting animation. I ended up going in the direction of a natural scene, by having the leopard in a jungle with models I used from the content browser, a feature I discovered later on in the module. I added in some basic lighting and camera work as I did not want to spend too much time in this area, and rather focus on having a smooth flowing animation.
After making these refinements and rendering out this animation, I took time to review it. I believe I'm strong in areas such as the basic key poses and incorporating all the various body parts to make it move smoothly. However, I recognise the need for improvement in adding detail and challenging myself with the anatomical and muscular dynamics of the animal. There is still a noticeable stiffness in the animal's gait, and I aim to make it more flexible. The rig was exceptionally well-designed and comprehensive, and I could have further explored the intricate and specific controls to enhance realism and to also study the animal more thoroughly.



Comments